|
BASICS: Transmission, die
Übertragung von Kursfehler auf Ruderkorrektur
Die Windfahne wird so um ihre Vertikalachse gedreht und
festgesetzt, dass sie im scheinbaren Wind senkrecht steht. Bei einer
Kursabweichung schlägt sie infolge Seitenwind um ihre Achse aus, dreht
über eine Vertikalschubstange und zwei Hebel einen in Pendelachse
gelagerten Drehschaft, der wiederum das Servoruder um seine Hochachse
dreht. Dadurch schwingt das Servoruder um die Pendelachse seitlich aus,
bis es im stationären Zustand den Drehschaftwinkel erreicht.
Im Folgenden werden die geometrischen Zusammenhänge zwischen
Kursabweichung, Windfahnen-Achsenneigung, Windfahnenrotation,
Drehschaftrotation, Servoruderanstellung, Drehmomentoutput,
Ruderkorrekturwinkel und Steuerweg wiedergegeben. Es werden die beiden
gängigen Übertragungsprinzipien Z-Schaft-Mechanik sowie
Kegelradübertragung mit der bei der WindGear-Anlage eingesetzten
Murray-Gleitblockgelenkübertragung hinsichtlich der Kraftentwicklung
bei unterschiedlichen Sollkursabweichungen verglichen.
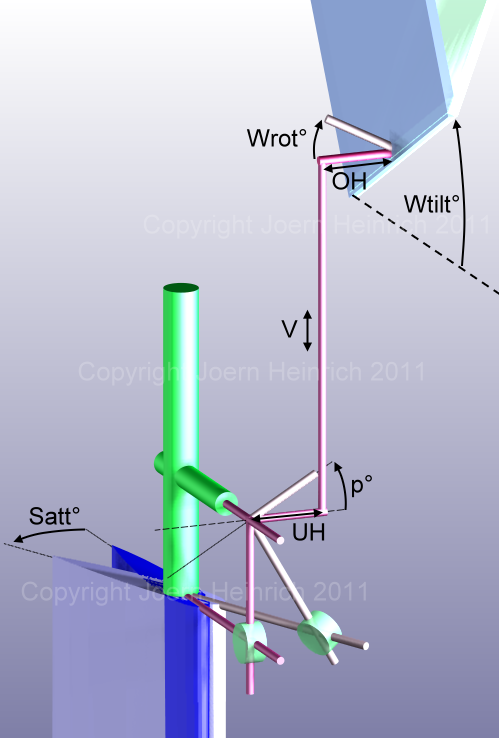
Kursfehler erzeugt Windfahnenrotation
Der Rotationswinkel der Windfahne (Wrot°) bei
gegebener Abweichung vom Sollkurs (Cerr°) ist nach Jan Alkema
abhängig von der Krängung (H°), dem Kurs zum scheinbaren Wind (KZW°)
und der Neigung der Windfahnenachse gegen die Horizontale (Wtilt°):
Wrot° = ARCTAN( TAN(Cerr°) / SIN(Wtilt°
+ H° * SIN(KZW°)) )______________ [1]
KZW° ist im Bereich von 0°...180°, wobei 180° genau
achterlichen scheinbaren Wind bedeutet und 90° einen annähernden
Halbwindkurs.
Wtilt°, die Neigung der Windfahne gegen die
Horizontale ist bei den meisten heutigen Windfahnensteuerungen ein
Festwert und beträgt 20°.
Cerr°, die Abweichung vom Sollkurs setzt die
Windfahne einer Seitenwindkomponente aus und verursacht deren Rotation
um ihre Achse.
Wrot°, die Windfahnenrotation, ist der Betrag,
um den sich die Windfahne bei gegebener Kursabweichung dreht, um wieder
parallel zu den Stromlinien im Wind zu stehen. Die maximale
Windfahnenrotation ist wegen ihrer Hebelübertragung auf eine
Vertikalschubstange begrenzt, Totpunkte gibt es bei +/-90°, denn
weitere Drehung kann ein einfacher Hebel an einer Achse nicht in eine
lineare Bewegung übertragen. Die meisten Windfahnen haben zur
Vermeidung des Erreichens des oberen oder unteren Totpunktes sowie
wegen der Gelenkenden der Übertragungshebel eine Limitierung der
Windfahnenrotation bei ca. +/-50 bis +/-60°.
Windfahnenrotation erzeugt Drehschaftrotation
Wie weit eine Vertikalschubstange vom Hebel an der Windfahne auf- oder
abbewegt wird (V), hängt sowohl von der Länge des Hebels (OH)
als auch der Windfahnneigung gegen die Horizontale (Wtilt°)
ab. Die Übertragung der Windfahnenrotation (Wrot°)
über einen Hebel der Länge OH auf eine Vertikalschubstange
lässt sich wie folgt beschreiben:
V = OH * COS(Wtilt°) * SIN(Wrot°)____________________________________[2]
Die Vertikalschubstange dreht durch ihre Auf-oder Abwärtsbewegung (V)
über einen weiteren horizontalen Hebel der Länge UH den in der
Pendelachse befindlichen Drehschaft um einen Winkel p°. Dieser
Drehwinkel entspricht im stationären Zustand dem Pendelwinkel des
Servoruders. Die Drehschaftdrehung in Abhängigkeit von der linearen
Bewegung der Vertikalschubstange lässt sich beschreiben durch:
p° = ARCSIN( V / UH
)______________________________________________[3]
mit Gleichung [2] zu:
p° = ARCSIN( OH / UH * COS(Wtilt°) * SIN(Wrot°)
)_______________________[4]
Die Limitierungen der Windfahnenrotation definieren demnach gemeinsam
mit der Neigung der Windfahnenachse gegen die horizontale, sowie dem
Verhältnis der Hebel an Windfahne und Drehschaft den maximalen
Pendelwinkel. Aus diesem ergibt sich mit der Servoausgangshebellänge
damit der maximal von der Anlage erzeugten Steuerweg.
Drehschaftrotation erzeugt Servoruder-Anstellung
Den meisten heutigen Servo-Windfahnensteuerungen mit
Horizontalwindfahne ist gemeinsam, dass an der Windfahne waagerecht ein
Hebel befestigt ist, der über eine vertikale Schubstange einen Hebel an
einem horizontalen, in der Pendelachse liegenden Drehschaft betätigt.
Und diesen Drehschaft damit um einen bestimmten Winkelbetrag dreht. Die
Übertragung dieses Drehschaftwinkels auf die Anstellung des Servoruders
gegen die Schiffslängsachse ist jedoch unterschiedlich, gebräuchlich
sind:
- Kegelradgetriebe (Bevel Gear)
- Z-Schaft Übertragung
- Murray-Gleitblockgelenk (WindGear)
Im Folgenden werden diese Transmissionsprinzipien hinsichtlich ihres
relativen Servodrehmomentoutputs bei jeweils unterschiedlichen
Sollkursabweichungen verglichen.
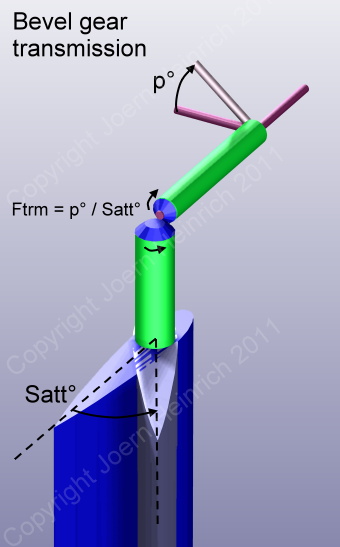
Kegelradgetriebe (Bevel Gear)
Beim Kegelradgetriebe sitzt am achteren Ende des horizontalen
Drehschaftes ein Kegelrad, am oberen Ende des drehbaren
Servoruderschaftes ein anderes. Dreht sich der Drehschaft, so wird
dieser Drehwinkel (p°) auf die Servoruderanstellung (Satt°)
im Untersetzungsverhältnis (Ftrm) der beiden
Kegelräder übertragen. Von den meisten Herstellern wird hierzu eine
Untersetzung 1:0.5 (=2) eingesetzt, was bei einer Drehschaftdrehung um
10° einer Servoruderanstellung um 5° entspricht. Es ergibt sich der
folgende einfache Zusammenhang zwischen Drehschaftrotation (p°)
und Servoruderanstellung (Satt°):
Satt° = p° / Ftrm_____________________________________________________[5]
 Von Vorteil ist bei der Kegelradübertragung, dass man das
Servoruder in Pendelrichtung unbegrenzt am Getriebe drehen kann, und
damit seitlich aus dem Wasser herausschwenken kann. Nachteilig ist,
dass sich das Spiel der Übertragungsmechanik schnell vergrößert, wenn
die Achsenlagerungen - speziell das Servoruderlager Spiel bekommt. Die
"Hebel" am Getriebe betragen üblicherweise um 15 bis 20 mm beim großen
und 7 - 14 mm am kleinen Kegelrad. Ein kleines mechanisches Spiel bei
derart kleinem Hebel wirkt sich störender auf die gesamte Hysterese der
Anlage aus, als das gleiche Spiel bei einem größeren Hebel. Von Vorteil ist bei der Kegelradübertragung, dass man das
Servoruder in Pendelrichtung unbegrenzt am Getriebe drehen kann, und
damit seitlich aus dem Wasser herausschwenken kann. Nachteilig ist,
dass sich das Spiel der Übertragungsmechanik schnell vergrößert, wenn
die Achsenlagerungen - speziell das Servoruderlager Spiel bekommt. Die
"Hebel" am Getriebe betragen üblicherweise um 15 bis 20 mm beim großen
und 7 - 14 mm am kleinen Kegelrad. Ein kleines mechanisches Spiel bei
derart kleinem Hebel wirkt sich störender auf die gesamte Hysterese der
Anlage aus, als das gleiche Spiel bei einem größeren Hebel.
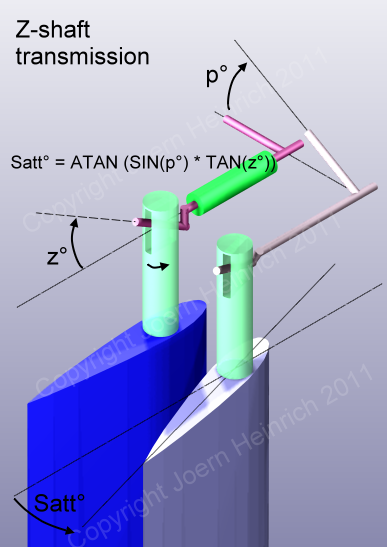
Z-Schaft Übertragung
Bei der Z-Schaft-Übertragung ist der Drehschaft Z-förmig gestaltet
(liegendes Z). Der schräge Teil des Drehschaftes sitzt in einem
vertikalen Schlitz im Servoruderschaft. Dreht sich der Drehschaft und
kippt damit den schrägen Teil aus der vertikalen, so erfolgt ein Druck
der Z-Schenkel an den gegenüberliegenden Innenseiten des Schlitzes und
dreht den Servoruderschaft.
Der Drehwinkel bei der Z-Schaft-Übertragung ist wie folgt abhängig vom
Winkel des schrägen Abschnitts des Drehschaftes (Z°) und der
Drehschaftrotation (p°):
Satt° = ARCTAN (SIN(p°) *
TAN(Z°))________________________________[6]
 Bei der skizzierten, einfachen Z-Schaft Transmission wird
die Kraft über eine sehr kleine Fläche im Schaftschlitz übertragen.
Sofern dort nicht noch eine Gleitmuffe vorhanden ist, liegt der
Z-Schaft nur mit seiner Rundung auf den Schlitzflanken auf. Er
überträgt den größten Teil der Kraft nur außen am Schaftschlitz auf den
Servoruderschaft. Gleichzeitig ist die Hebellänge hier nur im Bereich
des Radius des Servoruderschaftes - also 15-25 mm, radial zum
Drehschaft nur ein Drittel davon(!). Ein Wellenschlag auf das
Servoruder, der jenes um die Hochachse gegen den Widerstand der
Windfahne drehen will, trifft bei der Z-Schaft-Mechanik die winzigen
Kontaktflächen zwischen Schlitz-Innenwänden und Z-Schaft mit
hebelbedingt sehr hohem punktuellen Druck. Auch hier führt bereits
geringes mechanisches Spiel zu einem großen toten Winkel (Hysterese) um
die Steuer-Nullage. Bei der skizzierten, einfachen Z-Schaft Transmission wird
die Kraft über eine sehr kleine Fläche im Schaftschlitz übertragen.
Sofern dort nicht noch eine Gleitmuffe vorhanden ist, liegt der
Z-Schaft nur mit seiner Rundung auf den Schlitzflanken auf. Er
überträgt den größten Teil der Kraft nur außen am Schaftschlitz auf den
Servoruderschaft. Gleichzeitig ist die Hebellänge hier nur im Bereich
des Radius des Servoruderschaftes - also 15-25 mm, radial zum
Drehschaft nur ein Drittel davon(!). Ein Wellenschlag auf das
Servoruder, der jenes um die Hochachse gegen den Widerstand der
Windfahne drehen will, trifft bei der Z-Schaft-Mechanik die winzigen
Kontaktflächen zwischen Schlitz-Innenwänden und Z-Schaft mit
hebelbedingt sehr hohem punktuellen Druck. Auch hier führt bereits
geringes mechanisches Spiel zu einem großen toten Winkel (Hysterese) um
die Steuer-Nullage.
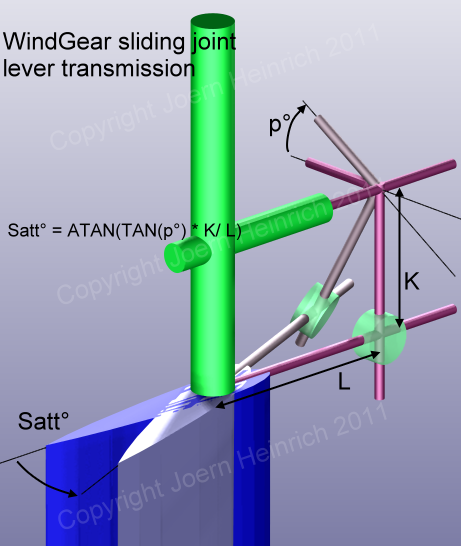
Murray-Gleitblockgelenk, rechtwinkliges Gestänge
Die Übertragung wird ausgeführt über ein zweiteiliges Gleitblockgelenk
mit gegeneinander drehbaren Blöcken, die je eine Bohrung für einen
Hebel haben. Das Gleitblockgelenk ist leicht verschiebbar auf den
Hebeln. Am Drehschaft ist eine vertikale Steuerstange befestigt, die
über das Gleitblockgelenk ihre Auslenkung auf die horizontale
Servoruderpinne überträgt. Die Servoruderpinne dreht das Servoruder um
seine Hochachse (Satt°).
Der Zusammenhang zwischen Drehschaftrotation(p°) und
Servoruderanstellung (Satt°) lautet mit:
K = vertikaler Abstand des Gleitblockgelenkes von der
Pendelachse
L = horizontaler Abstand des Gleitblockgelenkes von der
Servoruder-Hochachse
Satt° = ARCTAN (TAN(p°) * K[mm] / L[mm]
)_____________________________[7]
Bei dieser Übertragungsmechanik wirkt sich das Spiel im
Übertragungselement in sehr geringem Maß auf die Hysterese (Gesamtspiel
in der Übertragung) aus, weil die Hebel vergleichsweise lang sind.
Numerischer Vergleich der drei Übertragungsprinzipien
Die drei unterschiedlichen Übertragungsprinzipien erzeugen eine
unterschiedliche Anstellung des Servoruders mit der Drehschaftrotation
(p°). Die Steuerkraft des Servoruders jedoch ist proportional zu seinem
Anstellwinkel (Satt°). Das heißt, dass die drei
Übertragungsprinzipien einen unterschiedlichen Verlauf der
Kraftentwicklung mit steigender Kursabweichung zeigen. Es werden für
die Berechnungen eingesetzt:
- Windfahnen-Achsenneigung alle = 20°
- Z-Schaft-Mechanik hat 30° Z-Winkel
- Kegelradgetriebe hat Winkeluntersetzung 1:0,5
- Murray-Gestänge hat Geometrie K= 50 und L=100 [mm]
Die genannten Ausgangsbedingungen sind marktüblichen Anlagen entnommen
und für die erzielten Anfangswinkel vergleichbar. Die Übertragung von
Windfahnenrotation auf die Drehschaftrotation geht von identischen
Rahmenbedingungen aus. Das Verhältnis von oberem Horizontalhebel zu
unterem Horizontalhebel ist so gewählt (45 mm / 43 mm), dass die
Windfahnenrotation in etwa der Drehschaftrotation entsprich.
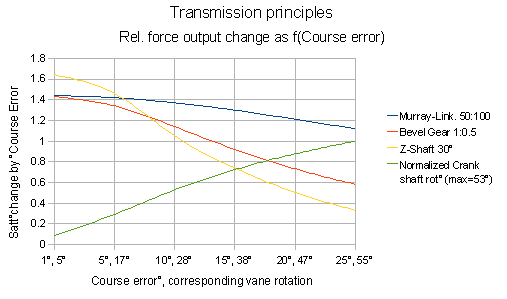
Auf der Y-Achse ist aufgetragen die Anstellwinkeländerung des
Servoruders je °Kursfehler. Diese ist proportional zum Zuwachs an
Kraftoutput je Grad zusätzlichem Kursfehler. Auf der X-Achse ist der
absolute Kursfehler und die jeweils dazu korrespondierende steady-State
Windfahnenrotation aufgetragen.
Klar ersichtlich ist, dass eine 30°-Z-Schaft-Mechanik bei geringen
Kursfehlern kleiner als 7° bis 10° einen Vorteil gegenüber dem
Murray-Link und dem Kegelradgetriebe bietet. Über 10° Kursfehler nimmt
bei der Z-Schaft-Mechanik das je Grad Kursfehler zusätzlich erzeugte
Servodrehmoment jedoch stärker ab.
Die Gestänge/Gleitblockübertragung (Murray-Link) startet bei gleicher
Anfangskraftentwicklung wie das Kegelradgetriebe, doch weist bei
stärkeren Kursabweichungen als 5° ein stärker steigendes
Servodrehmoment als das Kegelradgetriebe auf. Bei einem Kursfehler von
15° erzeugt der Murray-Link je Grad zusätzlichem Kursfehler eine
deutlich größere Servoruderanstellung.
Damit bietet der Murray-Link gegenüber den beiden anderen Prinzipien
einen höheren nutzbaren Dynamikbereich des Windfahnenausschlags, der
auch bei großen, schnellen weil wellenbedingten Sollkursabweichungen
mit vergleichsweise stärkerem und schnellerem Gegenruder aufwartet.
Von der anderen Seite her betrachtet: Gerät eine Yacht mit einer
Z-Schaft-Windselbststeuerung auf raumem Kurs durch eine schnelle
Gierbewegung quer zur Welle, oder duch eine plötzliche Windänderung in
einer Boe Amwind sehr rasch an das Ende des Windfahnenausschlags, so
entwickelt das Servoruder dieser Anlage zum Gegensteuern weniger Kraft
gegenüber der Anlage mit Murray-Gleitblockverbindung oder
Kegelradgetriebe.
Andererseits ist bei einer Z-Schaft-Mechanik mit 30°-Z der Bereich der
Kursabweichungen bis 5° schneller und damit präziser ausgesteuert als
bei den beiden anderen Transmissionstypen. Vorausgesetzt war dabei ein
30°-Z-Schaft, eine 1:0.5-Kegelraduntersetzung und eine 50:100
Hebel-Geometrie.
Bei einem Kursfehler größer 12° unterschreitet die Z-Schaft-Mechanik
die absolute Steuerkraft der Gleitblockübertragung, bei einem
Kursfehler von schließlich 17° jene des Kegelradgetriebes (Auftragung
der erzielten Servoruderanstellwinkel Satt° gegen den Kursfehler
Cerr°):
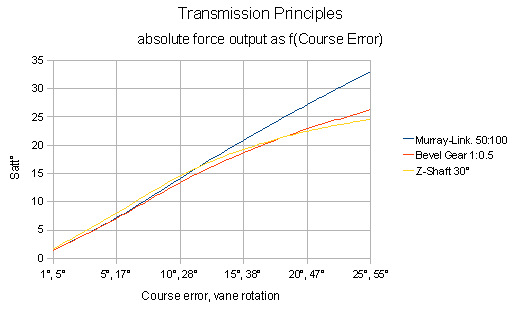
Es ist aus diesen erzielten Absolut-Anstellwinkeln des Servoruders
ersichtlich, dass speziell für wendige Kurzkieler das Prinzip der
Gleitblock-Hebelgestängeübertragung Vorteile bietet. Fälle, in denen
ein Kursfehler schnell größer als 15° Grad wird, sind auf einer kleinen
Fahrtenyacht im Seerevier wellenbedingt ab Bft 5-6 bereits häufig,
besonders auf halbem bis achterlichem Kurs.
Variation der Hebelgestänge-Geometrie und Windfahnenneigung
Bei der WindGear-Anlage ist das Verhältnis von Steuerstangenlänge (L)
zu Servopinnenlänge (K) nicht 50:100 sondern rechneroptimiert größer
gewählt. Bei gleicher Neigung der Windfahnenachse von 20° ergibt sich
das folgende Bild der WindGear-Geometrie im Vergleich zum 30°-Z-Schaft
sowie zur 1:0.5 Winkeluntersetzung per Kegelradgetriebe:
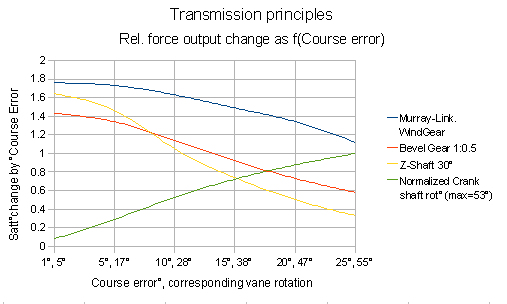
In der eingesetzten Windfahneneinstellung (alle mit 20° Neigung) ist
bereits in der Nullage bei geringsten Kursabweichungen der
Servodrehmoment-Zuwachs je Grad Kursabweichung der WindGear-Geometrie
höher als sogar derjenige der Z-Schaft-Mechanik mit 30°-Z. Solche
Einstellung der Windfahne bei 20° oder flacher, bietet sich bei der
WindGear-Anlage zum Segeln bei schwachwindigen Bedingungen und geringer
Schiffsgeschwindigkeit an.
Um zu vergleichbar kleinen Nullagen-Outputs zu kommen wie eine
30°-Z-Schaft- oder Kegelradmechanik mit Untersetzung = 2, wird bei der
WindGear-Anlage die Neigung der Windfahnenachse per Stellschraube
vergrößert, beispielsweise von obigen 20° auf 23°:
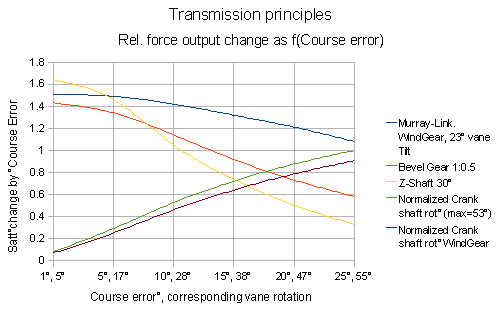
Und mit diesem kleinen Dreh an der Neigeeinrichtung für die
Windfahnenachse hat man eine Einstellung des Kraftoutputs, die um die
Nullage dem 30°-Z-Schaft sowie der 1:0.5-Kegelraduntersetzung
ebenbürtig, jedoch zu größeren Kursabweichungen deutlich überlegen ist.
Wegen der um 3° vergrößerten Neigung der Windfahnenachse verringert
sich für den größten Kursfehler (25°) die Windfahnenrotation auf 52°
(statt 55) , so dass durch diese bezüglich der Steuerkraft
hocheffektive Einstellungsmaßnahme nur marginal etwas vom maximalen
Steuerweg (=max Pendelwinkel 48° statt 53°) verlorengeht.
Joern Heinrich 04_2011
|
|
|